Transparent modeling of collision risk for three federally listed bird species in relation to offshore wind energy development
NOTE: SCRAM has been updated substantially since Version 1.0.3 was released in 2022. Version 1.0.3 (discussed on this webpage) is no longer the best available science. SCRAM 2.0 is in review with BOEM and FWS and will be publicly released shortly.
To estimate risk of avian collisions with offshore wind energy turbines in the U.S. Atlantic, a stochastic collision risk model using movement data from automated radio telemetry studies has been developed for three federally protected bird species: the Roseate Tern (Sterna dougallii), Piping Plover (Charadrius melodus), and Red Knot (Calidris canutus). An online web application of the model, called Stochastic Collision Risk Assessment for Movement (SCRAM), and accompanying user manual have been made publicly available to help transparently estimate collision risk from offshore wind farms in the U.S. Atlantic.
USFWS Lead Investigator:
Pam Loring (pamela_loring@fws.gov)
BRI Lead Investigators:
Andrew Gilbert (andrew.gilbert@briwildlife.org)
Evan Adams (evan.adams@briwildife.org)
Kate Williams (kate.williams@briwildlife.org)
View the recording of the SCRAM Tool Webinar: On March 4th, RWSC hosted a SCRAM Tool Webinar. Lead investigators from USFWS, BOEM, and Biodiversity Research Institute gave an overview of their stochastic collision risk model that uses movement data from automated radio telemetry to estimate avian collision risk.
View the recording and slides from the webinar here.
Study Background and Objectives
Collision risk models are often used to estimate risk of avian collisions with offshore wind energy turbines. Such models typically use avian density data derived from observational survey datasets for a location along with a suite of behavioral and site-specific variables that predict collision risk. However, very limited survey data are available for the Roseate Tern, Piping Plover, and Red Knot. Thus, automated radio telemetry data was used to develop movement models that were linked to monthly population estimates, density estimates at specific flight heights, and other species- and site-specific characteristics (such as number of turbines in a specified turbine array) to estimate collision risk for locations across a portion of the United States Northeastern Continental Shelf Ecosystem (NES).
The objective of this study to create a collision risk decision support tool for offshore wind energy development based on current knowledge of three federally protected bird species on the NES.
What is SCRAM?
SCRAM is a publicly available web application and user interface that helps users to estimate collision risk to birds from offshore wind farms in the U.S. Atlantic. It runs a stochastic collision risk model that was developed using movement data from automated radio telemetry studies for three federally protected bird species: the Roseate Tern, Piping Plover, and Red Knot.
The collision risk estimation process includes four main components:
(1) movement modeling to determine monthly occupancy rates over the NES (Figure 1)
(2) linking of monthly population estimates to occupancy rates to estimate species density across the NES,
(3) flight height estimation from Motus data to further refine the proportion of the population at risk for collision, and
(4) a collision risk model that uses density estimates at specific flight heights (along with a suite of other species- and location-specific parameters) to estimate collision for a specified turbine array.
SCRAM packages the above model components into a web application for transparency and ease of use (Figure 2). SCRAM will continue to be updated with model improvements, bug fixes, and additional functionality.
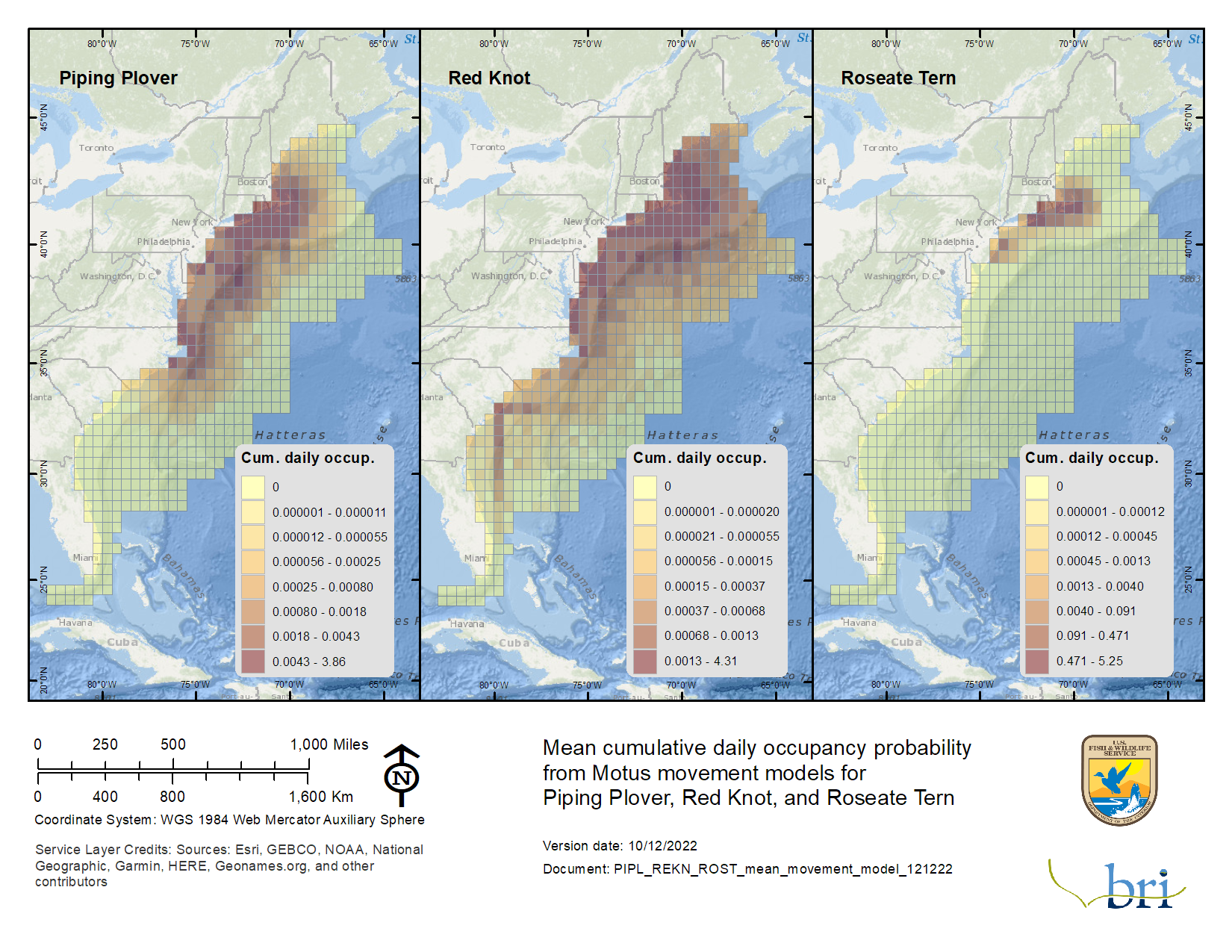
Figure 1. Average cumulative daily occupancy estimates for the three study species. Estimates are based on multi-state movement models using Motus data and the number of tagged individuals in the study area.
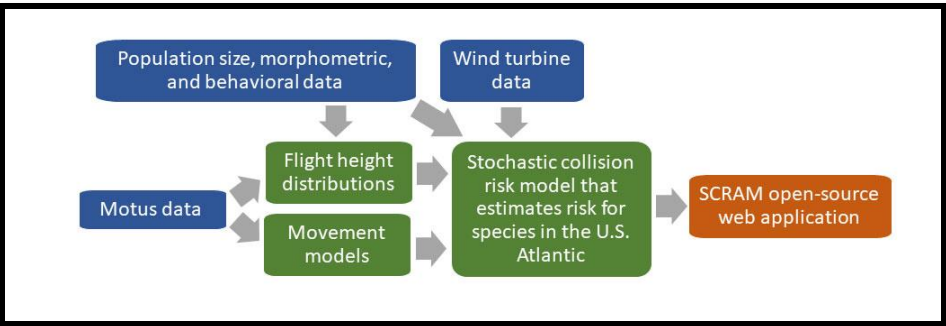
Figure 2. SCRAM study components
Study Resources and Updates
NOTE: SCRAM has been updated substantially since Version 1.0.3 was released in 2022. Version 1.0.3 (discussed on this webpage) is no longer the best available science. SCRAM 2.0 is in review with BOEM and FWS and will be publicly released shortly.
- Model code: Available here. Updates to the model code and/or web application code are documented at this GitHub site.
- Web application: Stochastic Collision Risk Assessment for Movement (SCRAM). 2022. Version 0.91.1. Available here. The most updated application will always be available at this link; the current version is documented in all model outputs.
- User manual for web application: Gilbert AT, Adams EM, Loring P, Williams KA. 2022. User documentation for the Stochastic Collision Risk Assessment for Movement (SCRAM). Available here. 37 pp. (most up to date version is available via the book link at the header of the application user interface).
- BOEM Study Report: Found here. Addenda to this final report will be developed to document major updates and will be posted here.
- Technical Summary of the 2022 BOEM Study Report: Found here.
Next Steps
SCRAM will continue to be updated through at least 2024. These activities are expected to include:
•Maintain SCRAM and keep all tool information up to date
•Conduct an external review of the tool
•Conduct a sensitivity analysis to determine the most important inputs to the model
•Incorporate other sources of movement and flight height data
Disclaimers
Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government. The findings and conclusions in this article are those of the author(s) and do not necessarily represent the views of the U.S. Fish and Wildlife Service.
Acknowledgments
This study was funded in part by the U.S. Department of the Interior, Bureau of Ocean Energy Management, Office of Renewable Energy Program, Washington, DC, through Intra-Agency Agreement Number M19PG00023 with the Fish and Wildlife Service (USFWS).
We would like to thank David Bigger, Brian Gerber, Emily Argo, and Tom Wittig for their reviews of earlier versions of the models, user interface, and user manual; Susi von Oettingen, Wendy Walsh, and Anne Hecht for input on species data to incorporate into models; and David Bigger, Timothy White, and Michael Rasser for their reviews of the final BOEM report. Sarah Dodgin and Wing Goodale supported aspects of this study. Chris Field and Brian Gerber of the University of Rhode Island conceived of and developed an initial version of the models. Additionally, Dr. Gerber continued to provide helpful project feedback after their portion of the project was complete. After the project transfer, BRI finalized and tested all the models, modified the user interface (UI) and automated reports, solicited feedback on the approach, UI and reports, and created documentation for the approach and the tool. SCRAM builds upon significant intellectual and analytical contributions from earlier collision risk models, including models by Band (2012), Masden (2015), and McGregor et al. (2018).
Photo Credits: Header photo © Shutterstock